- We study the syntax and semantics of the continuous-time model
- We show how to model continuous systems using differential equations.
- We study how to solve differential equations numerically.
- We define the notion of stability.
Exercise 1
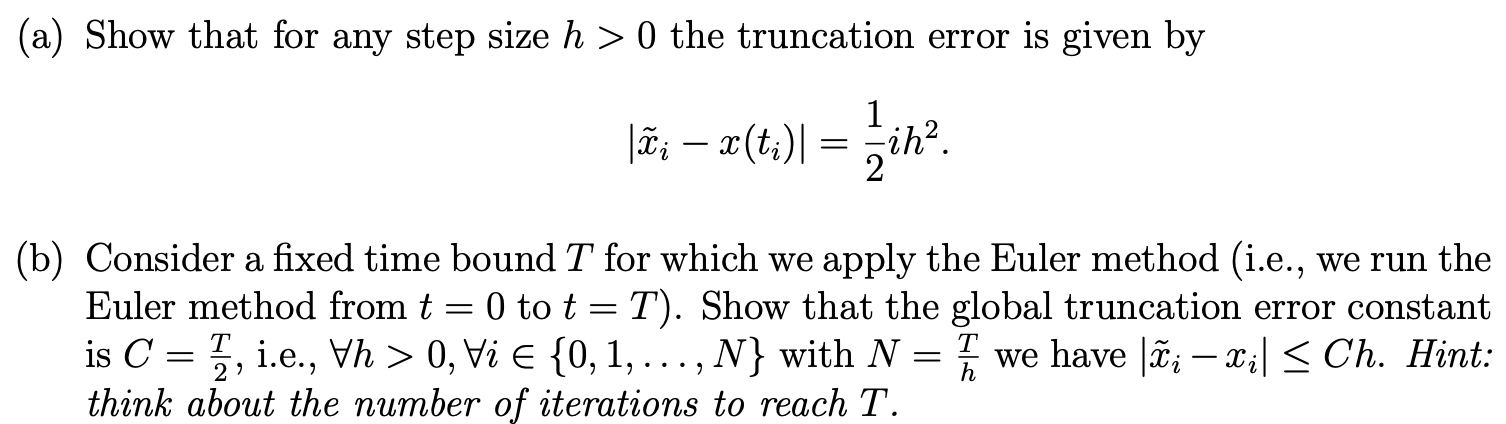
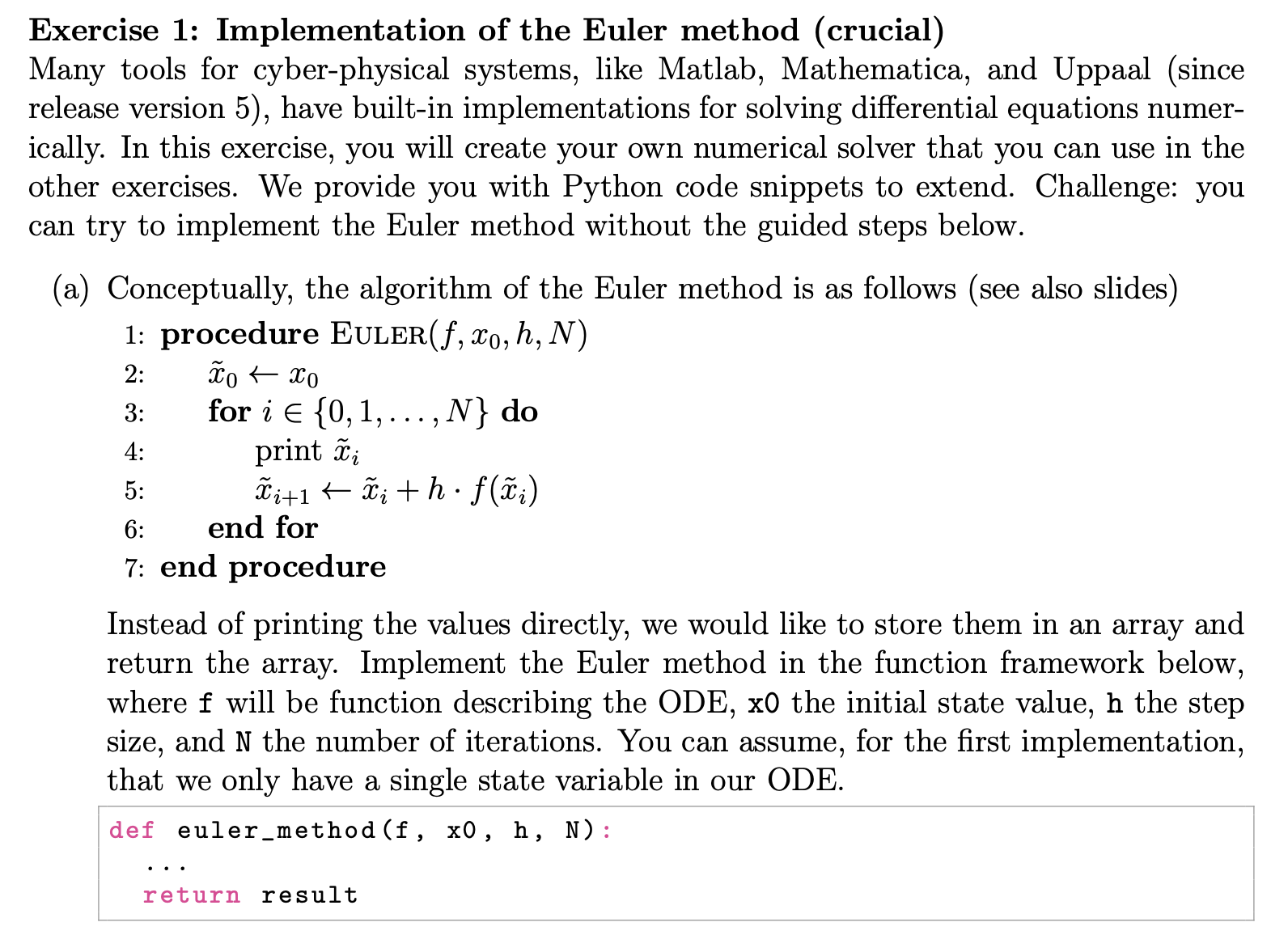 a)
a)
def euler_method (f , x0 , h , N ):
x[0] = x0
for i in range(N):
print(x[i])
x[i + 1] = x[i] + h * f(x[i])
return xb)
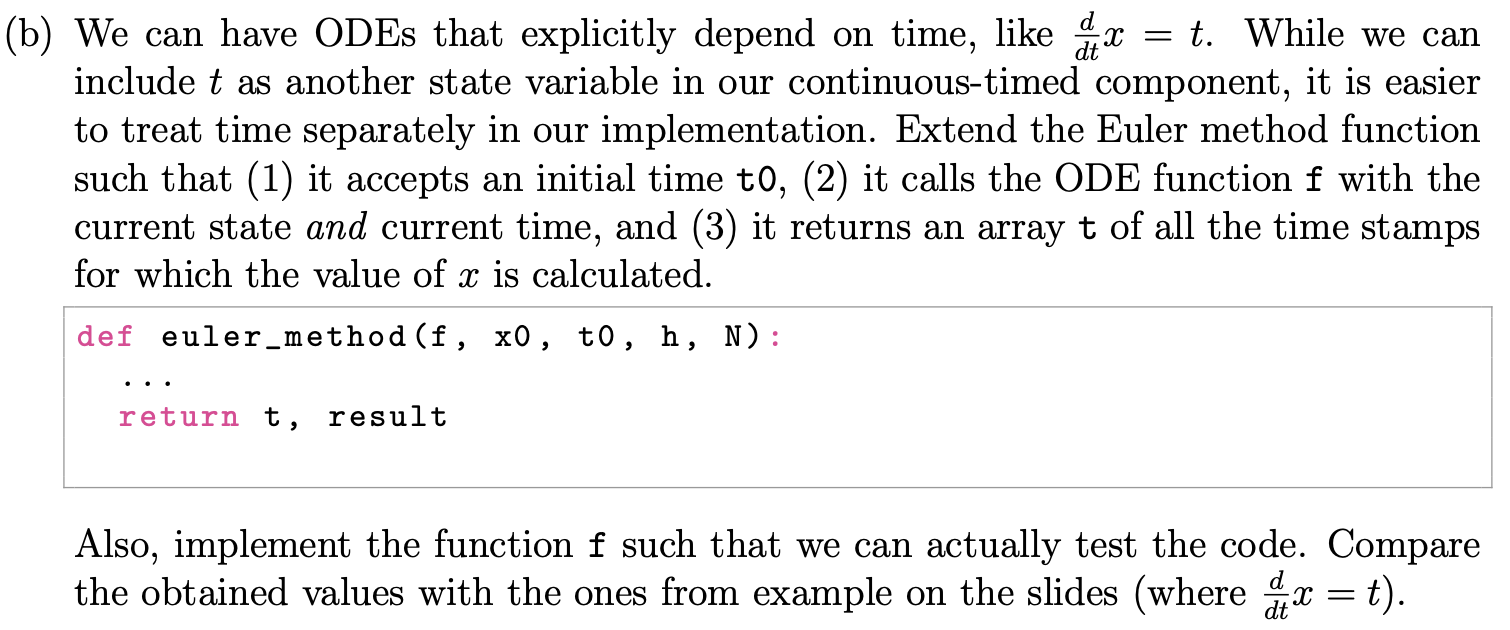
def euler_method(f, x0, t0, h, N):
# Initialize arrays to store results
x = [0] * (N + 2)
t = [0] * (N + 2)
# Set initial conditions
x[0] = x0
t[0] = t0
# Perform Euler method iterations
for i in range(N + 1):
print(x[i]) # Print current value of x
t[i + 1] = t[i] + h # Update time
x[i + 1] = x[i] + h * f(x[i], t[i]) # Update x using Euler formula
return t, x
def f(x, t):
return t # The function dx/dt = t
# Example call
t, x = euler_method(f, 0, 0, 1, 5)

So this is correct because our x0 variable is just whatever input variables we can give it, it is not the order of anything, it is just the input variables. Example 1,3,5 where 1 is the speed, 3 is the drag, and 5 is acceleration.
def euler_method(f, x0, t0, h, N):
# Initialize arrays to store results
x = [0] * (N + 2)
t = [0] * (N + 2)
# Set initial conditions
x[0] = x0[0]
t[0] = t0
# Perform Euler method iterations
for i in range(N + 1):
print(x[i]) # Print current value of x
t[i + 1] = t[i] + h # Update time
x[i + 1] = x[i] + h * f(x[i], t[i]) # Update x using Euler formula
return t, x
def f(x, t):
return t # The function dx/dt = t
# Example call
t, x = euler_method(f, [1], 0, 1, 8)
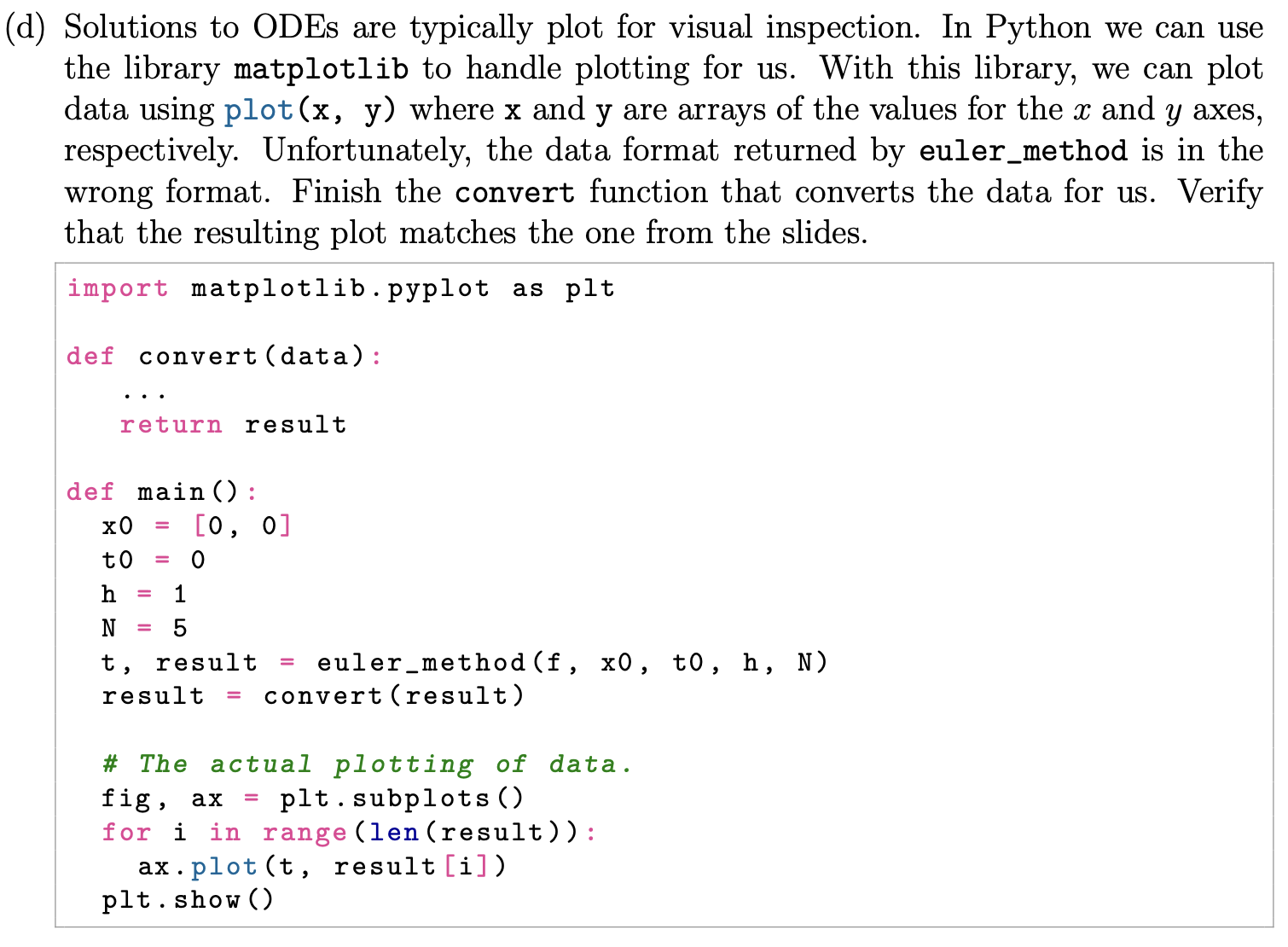
D)
Exercise 2
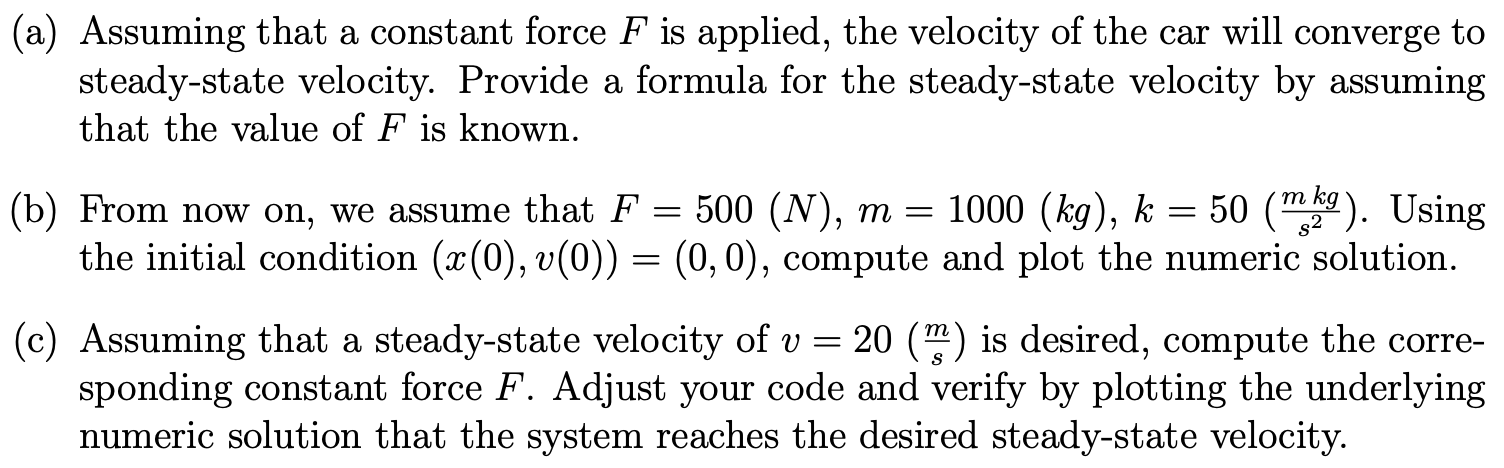
B)
def euler_method(f, x0, t0, h, N):
# Initialize arrays to store results
# x will be a list of vectors, each containing [position, velocity]
x = [None] * (N + 2)
t = [0] * (N + 2)
# Set initial conditions
x[0] = x0.copy() # Store the full initial state vector
t[0] = t0
# Perform Euler method iterations
for i in range(N + 1):
print(f"Step {i}: position = {x[i][0]:.3f}, velocity = {x[i][1]:.3f}")
t[i + 1] = t[i] + h # Update time
# Get derivatives from f function
derivatives = f(x[i], t[i])
# Update state vector using Euler formula
x[i + 1] = [x[i][j] + h * derivatives[j] for j in range(len(x[i]))]
return t, x
def f(x, t):
F = 1000 # Applied force
m = 1000 # Mass
k = 50 # Damping coefficient
# x[0] is position, x[1] is velocity
der_x = x[1] # dx/dt = velocity
der_v = -k/m * x[1] + F/m # dv/dt = acceleration
return [der_x, der_v]
# Example call with initial position=1, initial velocity=0
t, x = euler_method(f, [1, 0], 0, 1, 88)
# Print final results
print("\nFinal Results:")
for i in range(len(t)-1): # -1 because we have N+2 elements but only N+1 are used
print(f"t[{i}] = {t[i]}, position = {x[i][0]:.3f}, velocity = {x[i][1]:.3f}")
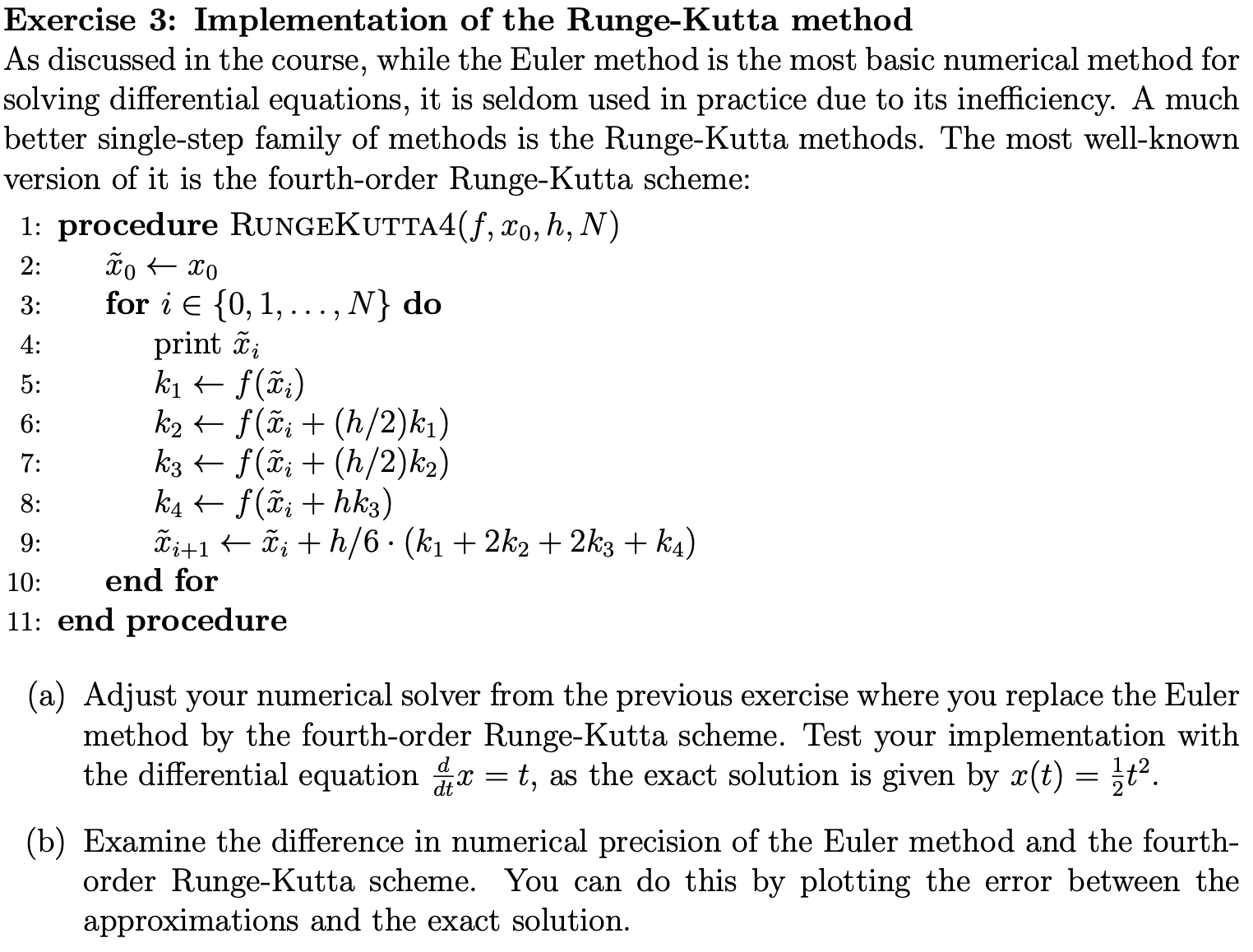
Exercise 3
Exercise 4
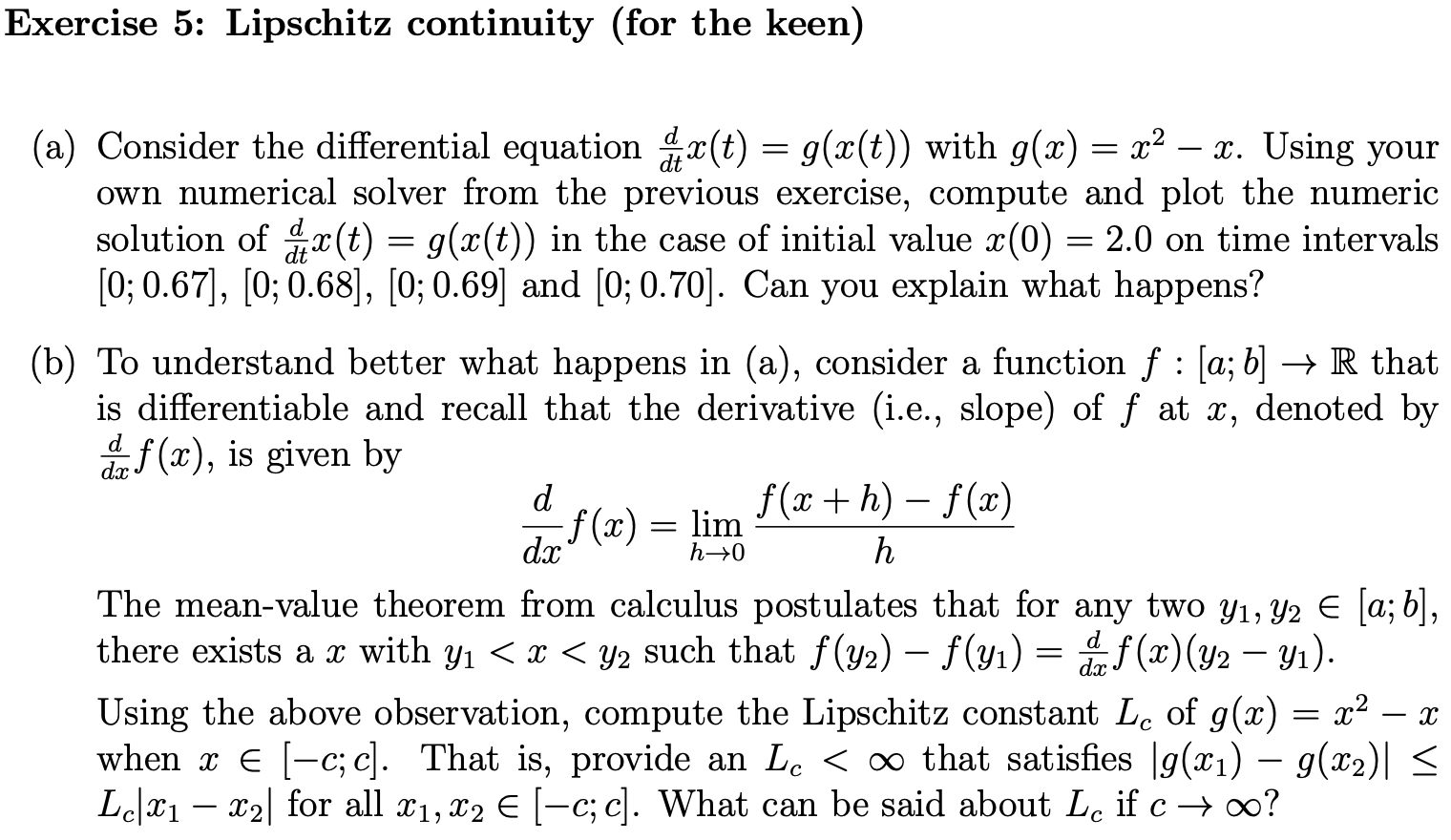
Exercise 5